Email Drop
info@kfcscrane.com
info@kfcscrane.com
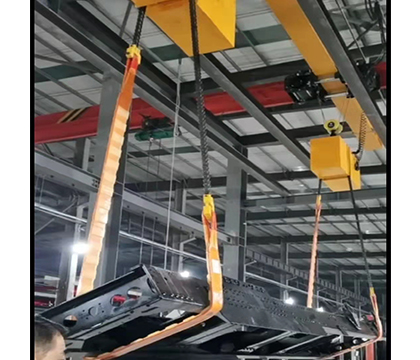
Intelligent cranes are modern lifting equipment that integrates advanced technologies and is designed to improve the efficiency and safety of lifting operations. By adopting technologies such as the Internet of Things, big data and artificial intelligence, intelligent cranes can achieve real-time monitoring, remote control and automated operation. It has a self-diagnosis function that can monitor the operating status of the equipment and remind maintenance in time to reduce the failure rate, thereby extending the service life of the equipment.

Intelligent cranes also have a flexible load management system that can automatically adjust lifting parameters according to actual conditions and improve operating accuracy. Its intelligent operation interface provides users with a friendly operating experience and reduces the requirements for operator skills. It is suitable for multiple industries such as construction, manufacturing, and logistics. By introducing intelligent elements, intelligent cranes not only improve work efficiency, but also create greater economic value for enterprises.
The anti-sway technology of intelligent cranes is to reduce or eliminate the instability caused by load swing during lifting through a variety of methods and systems. This technology aims to improve safety and operating accuracy, mainly including the following aspects:
● Sensor monitoring: Intelligent cranes are equipped with a variety of sensors, such as accelerometers, tilt sensors, and load sensors. These sensors monitor the motion state of the hook and the swing amplitude of the load in real time, and feed the data back to the control system.
● Control algorithm: Using advanced control algorithms such as PID control and fuzzy control, real-time analysis of sensor data, and calculation of the current swing amplitude and direction. The system automatically adjusts the crane's movements to offset the swing.
● Motion prediction: The algorithm predicts the movement trajectory and possible swing trend of the load, and takes corresponding control measures in advance, such as adjusting the lifting speed and position to reduce the impact of the swing.
● Electric drive technology: Using high-precision motors and reducers to provide smooth acceleration and deceleration, so that the crane's movements are softer when starting and stopping, and the swing caused by sudden movements is reduced.
● User interface and feedback: The operator monitors the load status and swing in real time through the intelligent control interface, and the system provides intuitive feedback to help the operator perform more precise operations.

As a manufacturer of intelligent cranes, KFCS is committed to combining advanced technology with efficient design to promote the intelligent development of the industry. We focus on the research and development of high-performance lifting equipment, using intelligent control systems and Internet of Things technology to achieve remote monitoring and data analysis of equipment, thereby improving operational safety and efficiency. Our products not only meet various industrial needs, but also focus on environmental protection and sustainable development, providing customers with comprehensive solutions.











Copyright © 2026 KFCS CRANE